Radioelektronický boj v konfliktu na Ukrajině - II

2. část
Proč jsou modernizované Geran-2 výrazně odolnější a co to znamená pro obranu.
V průběhu ruské invaze do Ukrajiny se objevily varianty bezpilotních dronů Geran-2,lépe odolávající pokusům o elektronické rušení a navigační sabotáž nežli jejich starší předchůdci[ruská verze iránského Shahed-136, vyráběná vezvláštní ekonomické zóně Alabuga průmyslového a výrobního typu, nacházející se 10km od města Jelabuga (rusky Елабуга, tatarsky Алабуга)v Tatarstánu v Ruské federaci, ležící 210km na východ od Kazaně, hlavního města Tatarstánu].
Ekonomická zóna Alabuga je akciovou společnosti se 100% účastí státu (Ministerstvo půdy a majetku Republiky Tatarstán).
Ruské modifikace používají ruské navigační moduly a pokročilé procesorové jednotky provádějící složité matematické algoritmy (filtrování, hodnocení věrohodnosti signálu), které dokážou odfiltrovat nebo alespoň rozpoznat abnormální úrovně rušení či pokusy o spoofing. Výsledkem je, že prostě vysílat silný šum neznamená automaticky ztrátu navigace.
Nejprve několik pojmů, které se budou v článku vyskytovat
Typy rušení:
Broadband noise jamming – širokopásmový šumový signál překrývající kanál ovládání.
Spot jamming – úzkopásmové rušení zaměřené na konkrétní frekvence (např. 2.4 GHz, 5.8 GHz).
Barrage jamming – kombinace více úzkopásmových rušičů.
Deceptive jamming (spoofing) – falešné signály GNSS imitující reálné satelitní navigační signály. [Pro vysvětlení GNSS – Global Navigation Satellite Systems poskytují přesnou polohu, rychlost a čas pomocí satelitů GPS(USA), GLONASS (Rusko), Galileo (EU) a BeiDou (Čína)]
Úrovně ochrany, z nichž některé mají charakter radioelektronického filtrování:
Frekvenční a spektrální adaptace
Využití frekvenčně adaptivního přeskakování (FHSS – Frequency Hopping Spread Spectrum): dron mění frekvenci přenosu podle pseudo-náhodného klíče, čímž se minimalizuje možnost trvalého zarušení.
DSSS (Direct Sequence Spread Spectrum) – rozprostření signálu do širokého pásma a následná korelační detekce; rušení s jinou kódovou sekvencí se v průměru odfiltruje jako šum.
Anténní techniky
Směrové antény a MIMO konfigurace(= Multiple Input Multiple Outputznamená více vstupů, více výstupů)které dokážou elektronicky potlačit signály přicházející mimo hlavní směr (princip prostorového filtru). [Znamená to použití více antén současně, každá s mírně odlišnou polohou nebo orientací a obsah signálů z nich matematicky kombinuje. Podle analýz a nálezů havarovaných dronů mají modernizované Gerany dvě nebo tři GNSS antény většinou typu patch (plochá, ideální do dronu, vyzařovací úhel ~60–90°), antény jsou umístěné v různých úhlech (různá orientace vůči nebi), GNSS modul umí volit optimální anténu podle SNR (=odstup signál/šum) či signál kombinovat fázově a přepínat při silném rušení na anténu s nejnižší interferencí. ]
Aktivní „nulling“ – vytvoření nul v anténním vyzařovacím diagramu proti známým zdrojům rušení.
Digitální filtrace v signálovém řetězci
Použití digitálních adaptivních filtrů na úrovni demodulace, zejména Wienerových a Kalmanových filtrů.Wienerovy a Kalmanovy filtry jsou pro nás radiotechniky novinkou – patří do digitální (statistické) filtrace signálů, ne do klasické analogové techniky jako Butterworthovy (maximálně plochá amplitudová charakteristika v propustném pásmu) či Čebyševovy filtry (strmější pokles v zakázaném pásmu za cenu vlnění v propustném pásmu).
Pro GNSS přijímače: možnost kombinace signálů více konstelací (GPS+GLONASS+Galileo), čímž se minimalizuje účinek jednofrekvenčního rušení.
Detekce anomálií
Implementace algoritmu pro detekci neobvyklých změn úrovně RSSI (Received Signal Strength Indicator) a přerušení datového toku – vyhodnocení jako pokus o rušení.
Automatické přepnutí do fail-safe režimu (Return-to-Home) nebo na optickou/inerciální navigaci.
Odfiltrování rušivých signálů
součást radioelektronické ochrany (Electronic Counter-Countermeasures, ECCM)
– kombinace adaptivní spektrální techniky, prostorového filtrování a DSP filtrů v komunikačním řetězci.
Ještě krátké vysvětlení digitálních a statistických filtrů nové generace
Wienerův filtr (1949) dává nejmenší průměrnou kvadratickou chybu (MSE) mezi odhadovaným a skutečným signálem. Vypočte se jednorázově – je statický (neadaptivní). Využívá Fourierovu transformaci (v kmitočtové oblasti). Jinými slovy: čím víc dominuje šum, tím menší váhu má dané pásmo. Používá se například pro potlačení rušení GPS signálu nebo šumové filtrace ve videu či audiosignálu.
Kalmanův filtr (1960) adaptivní rozšíření Wienerova filtru pro neustále se měnící podmínky. Vhodný, když se signál i šum mění v čase. Nepracuje přímo s frekvenční charakteristikou, ale s modely systému (tzv. stavový prostor). V každém kroku se provádí predikce + měření + korekce.
Praktický příklad.
Dron ztrácí GPS signál kvůli rušení:
Senzor GPS dodává zarušené údaje o poloze.
Inerciální měření (IMU) poskytuje rychlé, ale šumové odhady zrychlení a úhlů.
Kalmanův filtr kombinuje obě informace → odhadne skutečnou polohu i při výpadcích GPS.
Proč je IMU u Geran-2 tak důležitá
Modernizované ruské Gerany-2 mají výrazně přesnější IMU než první série z Íránu.
Dává jim to výhody:
Dron letí dál i při plném rušení GNSS
Ukrajinská REB může zcela vymazat satelitní signál –
ale IMU pořád měří zrychlení a zatáčky, takže dron:
drží směr podle gyroskopu,
drží rychlost podle akcelerometru,
výšku podle barometrického senzoru,
stabilitu podle aerodynamického modelu.
Chyba neroste tak rychle
INS s obyčejnou nízkou přesností by měla drift desítek metrů za minutu.
Modernizované Gerany mají drift řádově menší:
chyba po 5–10 minutách rušení = jednotky až desítky metrů, ne stovky.
Lze provádět korekce podle terénu nebo vizuálně
Novější verze mají i optický orientační systém pro finální fázi sestupu –
INS drží trajektorii, dokud nezačne kamerová / optická korekce
Druhá aplikace – filtrace datového kanálu:
přijímaný signál y(t)=s(t)+n(t)y(t) = s(t) + n(t)y(t)=s(t)+n(t),
Wienerův filtr potlačí frekvenční oblasti, kde dominuje šum (např. rušení na 2.4 GHz),
výsledek se použije pro dekódování telemetrie
Rušení (jamming) → přináší náhodný šum. Wiener filtr dokáže z něj statisticky „vytáhnout“ užitečný signál.
Podvržení (spoofing) → Kalman filtr může odhalit, že měření GPS „nesedí“ na očekávaný model pohybu.
Kombinace obou → elektronická odolnost (ECCM).
Kmitočty navigačních systémů
GPS (USA)
GPS využívá tzv. L-pásmo (1–2 GHz), které má v ionosféře výjimečně dobré vlastnosti — malé útlumy, relativně stálý index lomu a zároveň je možné jej zpracovávat malými anténami.
Označení pásma | Frekvence (MHz) | Účel / typ signálu |
|---|---|---|
L1 | 1575,42 MHz | civilní C/A kód, vojenský P(Y) kód |
L2 | 1227,60 MHz | vojenský P(Y) kód, dnes i civilní L2C |
L5 | 1176,45 MHz | bezpečnostní signál pro letectví (novější satelity) |
L3 | 1381,05 MHz | jaderné detekční satelity (DSP – ne navigační) |
L4 | 1379,913 MHz | experimentální (ionosférické korekce) |
GLONASS (Rusko)
GLONASS používá podobné pásmo, ale jiný princip FDMA (Frequency Division Multiple Access), tedy každá družice má jinou nosnou.
To je rozdíl oproti GPS, kde se používá CDMA (Code Division Multiple Access) — všechny družice vysílají na stejné frekvenci, ale odlišnými kódy.
Označení pásma | Střední frekvence (MHz) | Rozsah kanálů | Účel |
|---|---|---|---|
L1 | 1602 MHz ± 0,5625 MHz × N | N = -7…+6 | civilní i vojenský |
L2 | 1246 MHz ± 0,4375 MHz × N | N = -7…+6 | hlavně vojenský |
L3 (CDMA) | 1202,025 MHz | nové družice GLONASS-K | civilní signál |
Proč právě tato pásma?
Ionosférické okno:
L-pásmo (cca 1–2 GHz) má nejnižší útlum a rozptyl v ionosféře.
Pod cca 1 GHz začínají problémy s disperzí a odrazy, nad 2 GHz zas roste útlum v atmosféře (zejména vodní pára a kyslík).
Proto je pásmo kolem 1,2–1,6 GHz ideální kompromis.Souvislost s rezonancí vodíkového jádra (protonový přechod):
Ta se skutečně nachází u 1420,405 MHz, což je slavná 21 cm čára – klíčová v radioastronomii.
Navigační systémy se tomu pásmu záměrně vyhýbají, aby nerušily astronomická pozorování.
1227 MHz (L2) i 1575 MHz (L1) leží v bezprostředním sousedství tohoto „tichého“ okna, tedy fyzikálně podobné podmínky – stabilní šíření, minimální ionosférické odchylky.
Po této předmluvě se dostáváme k vlastnímu textu článku.
Když šum lze potlačit — jak funguje moderní odolná rádiová komunikace
Verze vhodná pro širší odborné publikum
Elektronický boj a protiradiový průzkum nejsou záležitostí jen armádních laboratoří — dnes rozhodují i o přežití bezpilotních systémů a spolehlivosti civilní komunikace. Tento článek vysvětluje, jak moderní metody zpracování signálu, autokorelace a senzorová fúze mění poměr sil v éteru. Nejde o „magii“, ale o kombinaci principů, které technici dobře znají — rozprostřené spektrum, matched filtering, frekvenční hopping a adaptivní filtrace — přetvořených do dnešní digitální podob.
1. Co znamená „rušení“ a proč bývalo efektivní
V nejprostším slova smyslu rušení (jamming) znamená, že do téhož frekvenčního pásma vysíláme tak silný signál, že užitý přijímač nedokáže spolehlivě rozeznat informace od užitečného signálu. U navigačních systémů (typicky GNSS) to funguje tak, že přijímač ztratí možnost synchronizovat se s unikátním kódem satelitu — a tím i schopnost určit přesnou polohu.
V dřívějších dobách to stačilo: pokud jste umístili silný lokální jammer, většina off-the-shelf přijímačů „oslepne“. Přijímače byly navrženy s ohledem na typické šumové podmínky anebo na jednoduché protizarušení; nebyly koncipovány na to, že signál bude výkonově skryt hluboko pod šumovou hladinou, ale přesto bude rekonstruovatelný.
2. Základní posun paradigmatu — známý vzor místo absolutní úrovně
Hlavní myšlenka, která mění pravidla hry, je jednoduchá: místo aby přijímač rozhodoval podle okamžité úrovně signálu, rozhoduje podle shody s předem známým vzorem. Pokud je struktura signálu známá (např. PN-kód, pilotní sekvence, modulace s pilotem), pak i velmi slabý signál lze z šumu „vytahat“ pomocí korelace. Tento princip stojí za řadou metod, které dnes označujeme jako rozprostřené spektrum a matched filtering.
2.1 Rozprostřené spektrum (DSSS) a processing gain
DSSS (Direct Sequence Spread Spectrum) rozprostře každý datový bit do dlouhé sekvence čipů [pro vysvětlení těmi čipy=chips_per_bit jsou označovány bity zvláštního bitového slova,v podkladech ze kterých jsem čerpal je v simulacijeden datový bit rozprostřen (DSSS) do 1000 čipů (chips_per_bit = 1000), signál byl -10dB pod šumem, po korelačním „despreadingu“ (matched filter = korelace s lokální kopií PN) se SNR přiblížila k +20 dB — tedy signál je nyní dobře čitelný, nejjednodušší je pětibitové slovo jak si ještě pamatuji z přednášek v roce 1980, toto slovo po korelaci je vyhodnoceno jako 1 bit užitečného signálu] podle pseudonáhodného kódu. Na přijímači se provede korelace s lokální kopií tohoto kódu — při správném zarovnání se energie všech čipů sčítá a vytvoří výrazný korelační vrchol. Šum se náhodně vyruší, protože jeho příspěvky při integraci nesumují koherentně. Výsledkem je tzv. processing gain GdB=10log10(Nc)G_{dB} = 10\log_{10}(N_c)GdB=10log10(Nc), kde NcN_cNc je počet čipů na bit. Prakticky to znamená, že signál například −10 dB pod šumem se po korelaci může objevit jako +20 dB nad lokálním šumem — pokud je použit dostatečně dlouhý kód. (Mezihvězdná komunikace je tak možná při abnormálním snížení přenosové rychlosti.)
2.2 Matched filter / autokorelace — vyhledávání vzoru
Matched filter (shodný filtr) provádí korelaci s očekávaným průběhem signálu; v oblasti vyhledávání kódu (acquisition) a sledování (tracking) se tak detekuje přesné zpoždění a fáze. Autokorelace je přitom souborem matematických metod měřících míru podobnosti signálu s jeho posunutou kopií — když korelace vykazuje lokální maximum, znamená to správné nasazení kódu a tedy přítomnost signálu i pod hladinou šumu.

Obr. 1 – Autokorelace PN sekvence
3. Další „vrstvy“ odolnosti: frekvenční hopping a adaptivní filtrace
Když k tomu přidáte frekvenční přeskoky (FHSS), kde vysílač a přijímač mění frekvenci podle tajného pseudo-náhodného plánu, zůstává pro rušičku jen dvě možnosti: pokrýt široké pásmo (energeticky náročné) nebo koordinovat rušení s hopovacím vzorem (vyžaduje znalost klíče). Kombinace FHSS a DSSS je velmi silná — první snižuje účinnost cíleného zarušení, druhé umožní obnovit signál i při nízkém SNR.
Adaptivní filtrace (Wiener) potom pracuje ve frekvenční doméně a potlačuje spektrálně selektivní rušení. Zatímco matched filter a DSSS jsou „strukturální“ metody (využívají kód), Wiener filtr využívá znalosti spektra šumu a signálu k minimalizaci průměrné čtvercové chyby.
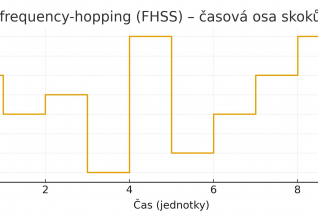
Obr. 2 – Princip frekvenčního hoppingu
4. Kalmanův filtr a fúze senzorů — jak překlenout výpadek GNSS
GNSS je skvělé pro absolutní pozici, ale může být v čase přerušeno. Inerciální senzory (IMU: gyra, akcelerometry) poskytují vysokofrekvenční informace o změnách pohybu, ale jejich chyba se integrovaně driftuje. Kalmanův filtr optimálně kombinuje obě datové toky: predikuje stav podle modelu pohybu a následně ho koriguje podle GNSS měření. Díky tomu systém přežije krátkodobé ztráty GNSS a plynule obnoví přesnost, když se signál znovu objeví. To je prakticky jeden z nejdůležitějších prvků moderní odolnosti.
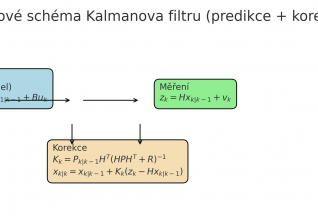
Obr. 3 – Blokové schéma Kalmanova filtru
5. Co z tohoto plyne pro praktické systémy — návrh „více vrstev“ ochrany
Praktická architektura odolného navigačního či komunikačního systému obvykle zahrnuje:
RF front-end s nízkošumovým zesilovačem (LNA) a kvalitním ADC;
paralelní korelační/pipeline bloky (často v FPGA) pro matched filtering a despreading;
moduly pro kompenzaci Doppleru a přesné časové synchronizace;
algoritmy adaptivní filtrace (Wiener), které minimalizují vliv spektrálního rušení;
Kalmanovu fúzi GNSS + IMU pro udržení navigace při přerušení GNSS;
anténní techniky (směrové antény, MIMO/beamforming) pro prostorové potlačení směrového rušení;
protokoly FHSS nebo dynamické změny parametrů, aby útočník nemohl snadno předvídat chování spojení.
Každá z těchto vrstev sama o sobě není absolutní zárukou; dohromady však tvoří robustní systém, který zvyšuje nároky na útočníka a často vyžaduje značné prostředky k efektivnímu zneškodnění spojení.

Obr. 4 – Schéma fúze GNSS + IMU
6. Implementační poznámky — hardware a reálné limity
Implementace dnes běží na kombinaci FPGA a výkonných embedded procesorů. FPGA zvládne masivní paralelní korelace (rychlé MAC operace), ARM jádro řeší vyšší logiku a Kalmanovu fúzi. Důležité body návrhu:
Délka PN kódu: větší délka = větší processing gain, ale nižší data rate. U navigace to často nevadí (nízká rychlost dat vs. potřeba spolehlivého určení času/pozičního parametru).
Vzorkovací frekvence: musí pokrýt šířku rozprostřeného pásma; vyšší vzorkování zvyšuje požadavky na ADC a výpočet.
Doppler a synchronizace: pohybové efekty rozmazávají korelační vrchol; korekce frekvenčního posunu je nutná.
Spotřeba: zvyšující se výpočetní nároky znamenají větší spotřebu energie a tepelné problémy, což jsou kritické faktory u malých UAS.
Tyto inženýrské kompromisy rozhodují, jak široce a kde lze podobné technologie nasadit.
7. Kde zůstávají otevřené slabiny — a jak se proti nim bránit
I nejrobustnější systémy mají slabiny: velmi širokopásmové rušení s vysokou výkonovou hustotou, sofistikovaný spoofing (pokud útočník zná nebo prolomí kódové schéma), fyzické zničení antény nebo vyřazení prostřednictvím kinetiky. Proto se obrana nemá spoléhat jen na jednu metodu. Doporučení praktického charakteru:
vícezdrojová senzorová síť (RF + optika + akustika),
rychlá forenzní analýza vraků a telemetrie (reverzní inženýrství),
hybridní taktiky: kombinace elektroniky, optiky, kinetiky a sítě velení pro adaptivní reakce.
8. Historie v kostce — od OMEGA a TACAN po dnešek
Principy vyhledávání signálu pod hladinou šumu nejsou nové: hyperbolické navigační systémy a některé dálkové komunikační systémy používaly techniky autokorelace a dlouhých kódů už dávno. Dnešní inovace spočívají v digitalizaci, výpočetní dostupnosti a masovém nasazení levného hardwaru, který tyto metody zpřístupnil i v malých platformách. Tedy: to, co bylo kdysi složité a drahé, dnes lze zrealizovat kompaktně a levně — a to mění pravidla hry.
9. Závěr a krátké zopakování
V radiotechnice existuje starý problém: jak extrahovat užitečný signál, když ho přehluší silnější rušení.
V tomto textu jste poznali, že s rozvoj výpočetní techniky umožnil použití dříve neznámých cest. Ŕešením je rozprostřené spektrum (spread spectrum) – technika, kdy se nosná frekvence signálu rozprostře do širokého pásma. Na přijímači se pak použije korelační filtr (correlation filter), který signál „znovu složí“ podle známé kódové sekvence. Rušič, který tuto sekvenci nezná, zasáhne celé pásmo, ale jeho výkon se rozprostře – a ztratí účinnost.
Moderní verze tohoto principu využívá přizpůsobivé filtry (adaptive filters), které se samy ladí podle změn prostředí.
Jde o algoritmy, které v reálném čase mění své parametry tak, aby maximalizovaly poměr signál/šum (SNR – Signal-to-Noise Ratio).
Geran-2 využívá právě tento princip – adaptivní filtr dokáže „vyčistit“ rušený signál, aniž by musel znát jeho původní tvar.
Kalmanův a Wienerův filtr
Zvláštní kapitolou jsou tzv. optimální filtry, především Kalmanův filtr a Wienerův filtr.
Tyto matematické postupy nepracují jen s okamžitou hodnotou signálu, ale s jeho pravděpodobnostním modelem – tedy s předpovědí, jak se signál bude vyvíjet v čase.
Díky tomu mohou „odhadnout“, co je ještě signál, a co už je náhodný šum.
V Geranu se tak spojuje jednoduchý hardware s velmi pokročilým softwarem pro prediktivní zpracování dat.
Dopplerovský efekt v navádění
Podobně jako u radarů či sonarů využívá i Geran tzv. Dopplerův posun (Doppler shift) – tedy změnu frekvence podle rychlosti a směru pohybu.
Na základě této změny může software dronu rozlišit, zda přicházející signál je od stacionárního zdroje (např. vysílač) nebo od pohybujícího se objektu (např. rušič, jiný dron).
Tento dopplerovský „podpis“ pomáhá algoritmu identifikovat zdroj rušení a obejít ho – stejně, jako se netopýr vyhne překážce díky echolokaci.
Kombinace destruktivního rušení a chytrých obranných metod se stává závodem: kdo rychleji inovuje, ten získá převahu. Pro ty, kteří budou navrhovat obranu nebo systémy komunikace, to znamená: myslete vícevrstvově, investujte do algoritmů i hardwaru, a nezapomínejte na fúzi senzorů. Principy DSSS, FHSS, matched filtering, Wiener/Kalman filtrace a anténních technik nejsou záhadou — jsou to osvědčené nástroje, které v dnešním kontextu získávají znovu na významu.
Proti MIMO GNSS, směrovým anténám, multiband L1/L2/L5 přijímačům, inercializované navigaci (INS) s korekcí od barometru a magnetometru),
…je účinnost rušení dramaticky nižší.
Proto první generace Shahed-136 (Geran-2) padala po stovkách.
Modernizované verze z let 2024–2025 mají násobně vyšší odolnost.

- tisk
- přeposlat emailem
- sdílet
- uložit jako oblíbené
- 1963x přečteno
Milan Knížák 1940 - 2026

Znovu důrazně prohlašuji, že český prezident Petr Pavel je přímým nepřítelem České republiky a měl by být sesazen a souzen pro vlastizradu.
Nejčtenější






Analýzy











Komentáře
Pro možnost psaní komentářů se přihlašte nebo zaregistrujte.